
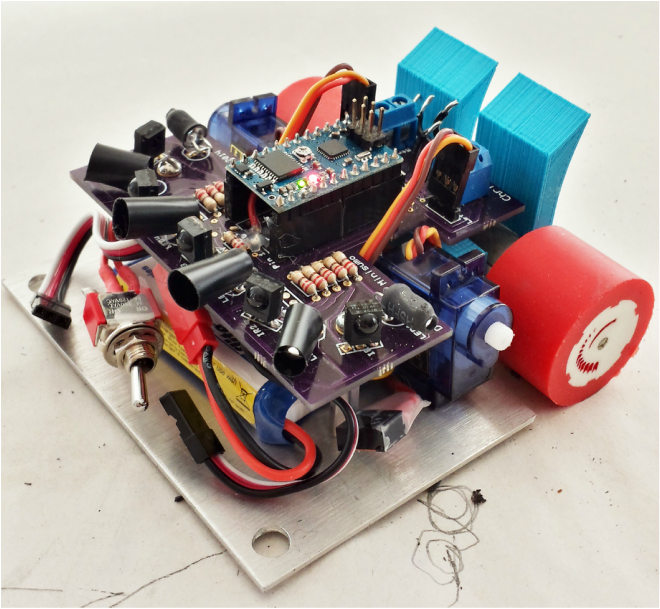
It's been over a year since I last made any additions to my minisumo robot design. However, I recently decided to dust it off and resume work on it since I thought it would be fun to have another minisumo to enter in competitions at some point.
Upon revisiting this project, I realized that in my original concept, in which the 'bot featured a flip-down scoop with lances to flip opponents, it would be difficult to keep the scoop from interfering with the IR sensor array (each sensor has a relatively wide field of view), especially since it would have to fold down at the beginning of every match, and the lances would undoubtedly take a while to fall into position (the robot exceeds the 10 cm length limit at the beginning of a match, which is why it needs some way to fold itself up, etc.)
So, I decided that the next best option would be to have the entire robot "stand" at the beginning of each match, then roll slightly backwards in order to bring the chassis into ready-position. The main advantage of this technique is that this allows the scoop to be in a fixed position in relation to the IR sensors, meaning that once tweaked and positioned correctly, it won't move during matches and confuse the robot.
In order to effect this change, I redesigned and reprinted the motor mounts with "props" to keep the robot standing before each match:
Upon revisiting this project, I realized that in my original concept, in which the 'bot featured a flip-down scoop with lances to flip opponents, it would be difficult to keep the scoop from interfering with the IR sensor array (each sensor has a relatively wide field of view), especially since it would have to fold down at the beginning of every match, and the lances would undoubtedly take a while to fall into position (the robot exceeds the 10 cm length limit at the beginning of a match, which is why it needs some way to fold itself up, etc.)
So, I decided that the next best option would be to have the entire robot "stand" at the beginning of each match, then roll slightly backwards in order to bring the chassis into ready-position. The main advantage of this technique is that this allows the scoop to be in a fixed position in relation to the IR sensors, meaning that once tweaked and positioned correctly, it won't move during matches and confuse the robot.
In order to effect this change, I redesigned and reprinted the motor mounts with "props" to keep the robot standing before each match:
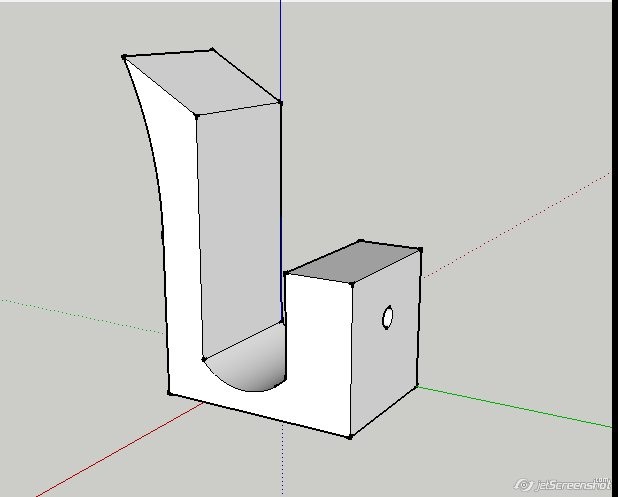
Each motor mount features an elongated "prop" and a small screw hole to fasten the motor into place.
The result is pictured below:
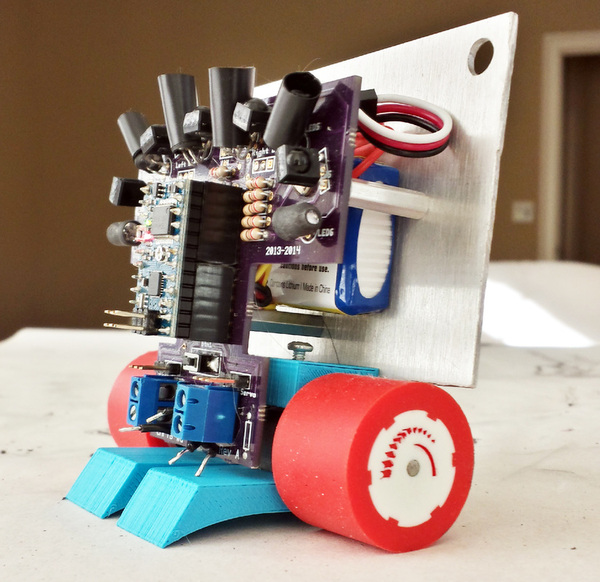
As you can see, this approach takes advantage of the lack of a height dimension limit for minisumo robots, as detailed in the Robogames rules page.
Obviously, there's still a lot of work to do on this robot. Next steps include: working on the offensive scoop, adding some protective covering to the motherboard, and adding line sensors.
Obviously, there's still a lot of work to do on this robot. Next steps include: working on the offensive scoop, adding some protective covering to the motherboard, and adding line sensors.
 RSS Feed
RSS Feed
