
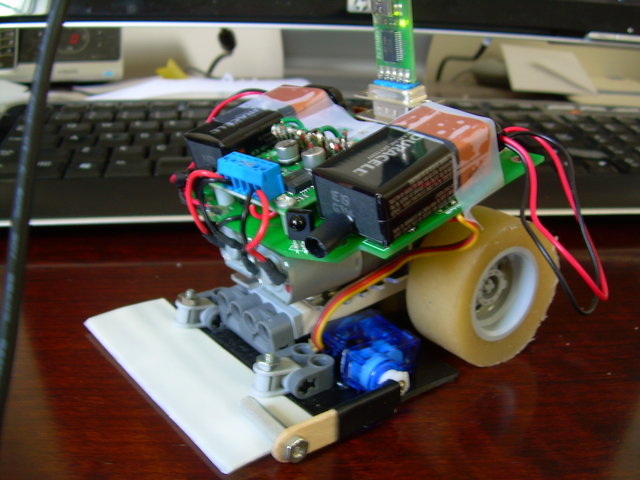

| This was my first attempt at a competitive robot to enter in a mini sumo robotics competition. It went through many developmental phases, and my final product was Rampant I. Batteries - 9v alkaline Drive Train - Two Pololu 73:1 motors. Pololu item #:1163 Sensors - Two contact switches (to sense edge of ring) and two Panasonic IR rangefinders. Processor - Basic Stamp 2 rev J. Programming Language - PBASIC Wheels - Custom molded polyurethane. Shore A hardness of 20. Motor Controller - Pololu Dual MC33887 Motor Driver Carrier Pololu item #:712 (This product has been discontinued) Chassis - Plastic Delrin sheet. Rampant was entered in the Atlanta Robot Rally in November 2011 and won second place, being defeated by Delta Force by Dale Heatherington (http://www.wa4dsy.com/robot/deltaforce-robot). In creating Rampant I, I learned how to mold custom wheels, a bit about physics and trig functions to calculate scoop angles, and how to create custom PCBs using CAD software. |
|
0 Comments
|
AuthorHi, I'm Chris! I like to tinker and build awesome things, and I'm fascinated by anything innovative and unique. Categories
All
Archives
August 2015
|
 RSS Feed
RSS Feed
