
 Tutti enjoys her classy ride | A few years ago when my family got our beloved cockatiel, Tutti, she hadn't yet grown all of her flight feathers, and thus couldn't flutter more than a few feet at a time. Rather than wait for her feathers to naturally grow in a month or two, the land-bound avian evoked my greatest sympathies. Something had to be done -- imagine having no choice but to strut about on those tiny feet!!! So, the logical solution to solving Tutti's predicament was to engineer a custom segway that she could steer and control by simply leaning this way and that on a birdy perch... Unfortunately, in the week it took me to design, build, and program her custom scooter, she had grown all her flight feathers, and could really see not point in riding the ungainly contraption that I had created when she could use her wings to soar (or rather, flutter) through the air. |
However, Tutti's desire to use her wings didn't prevent me from capturing a few decent images during her brief periods of cooperation!
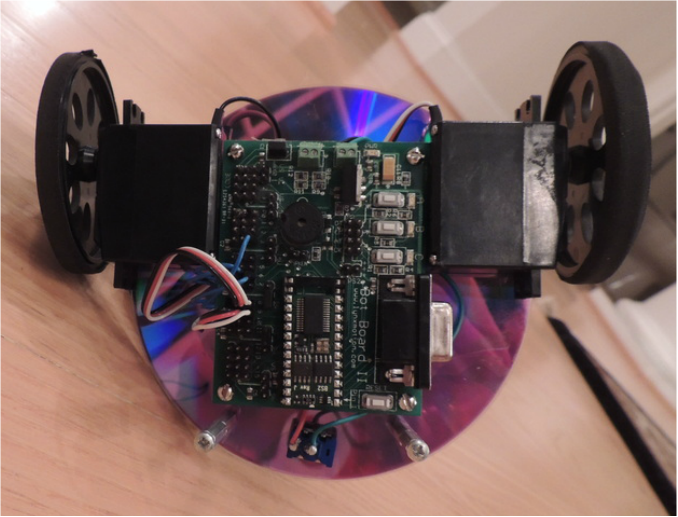
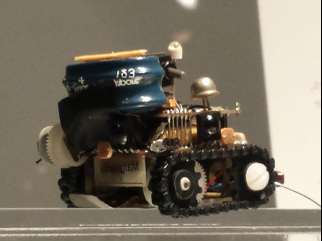
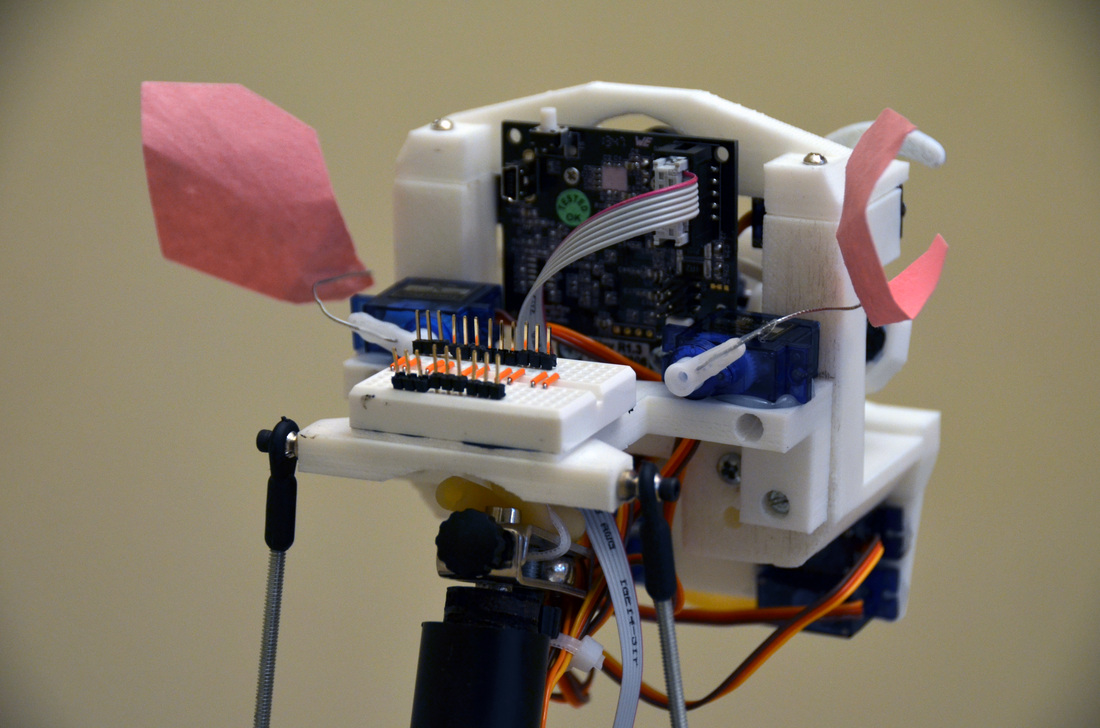
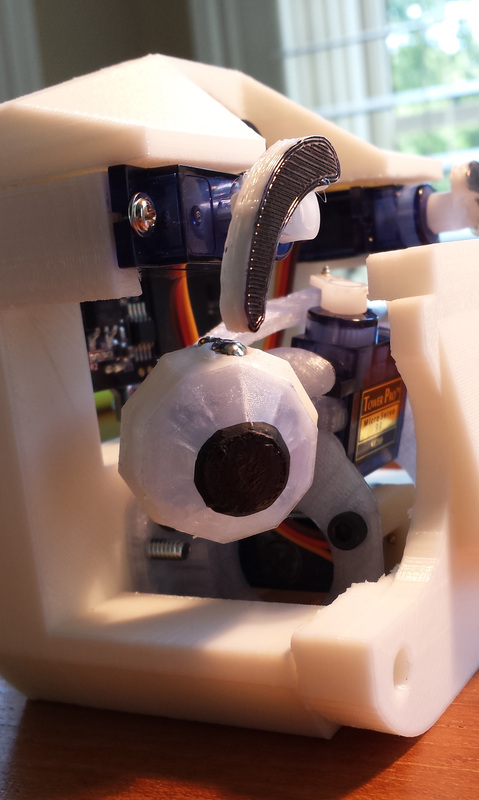
Technical Specs:
Microcontroller: Basic Stamp 2
Programming Language: PBASIC
Controller Board: BotBoard II
Power: Standard Alkaline 9V
Drive Train: 2x continuous-rotation servos
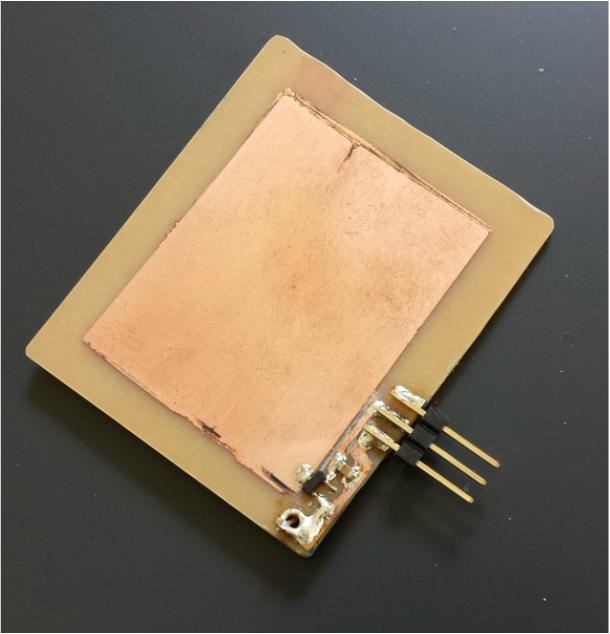
Sensor: Memsic 2125 Dual-axis Accelerometer
Chassis: Recycled CD-ROM
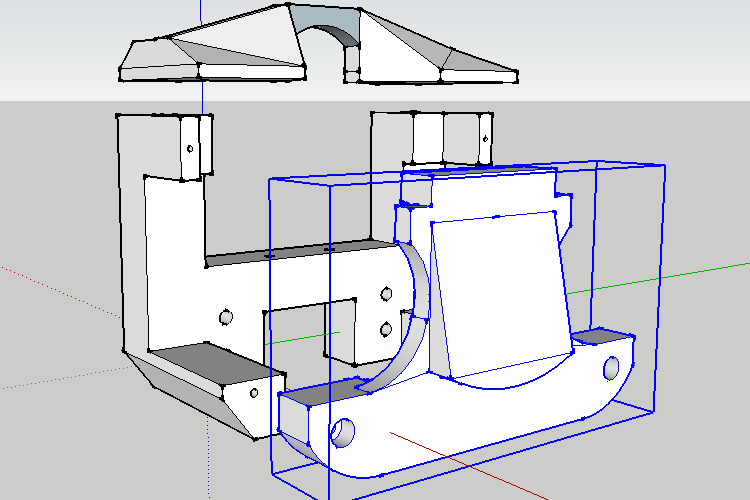
Theory of Operation:
The accelerometer measures the tilt of the birdy perch on the xy-axes, sending the values to the Basic Stamp, which, using a rudimentary proportional algorithm, calculates appropriate servo speeds and rotations.
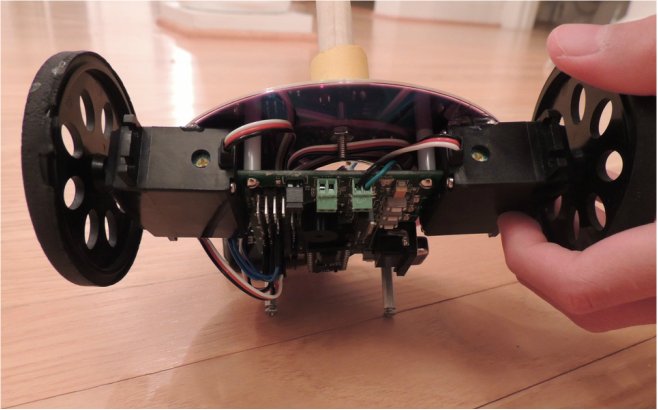
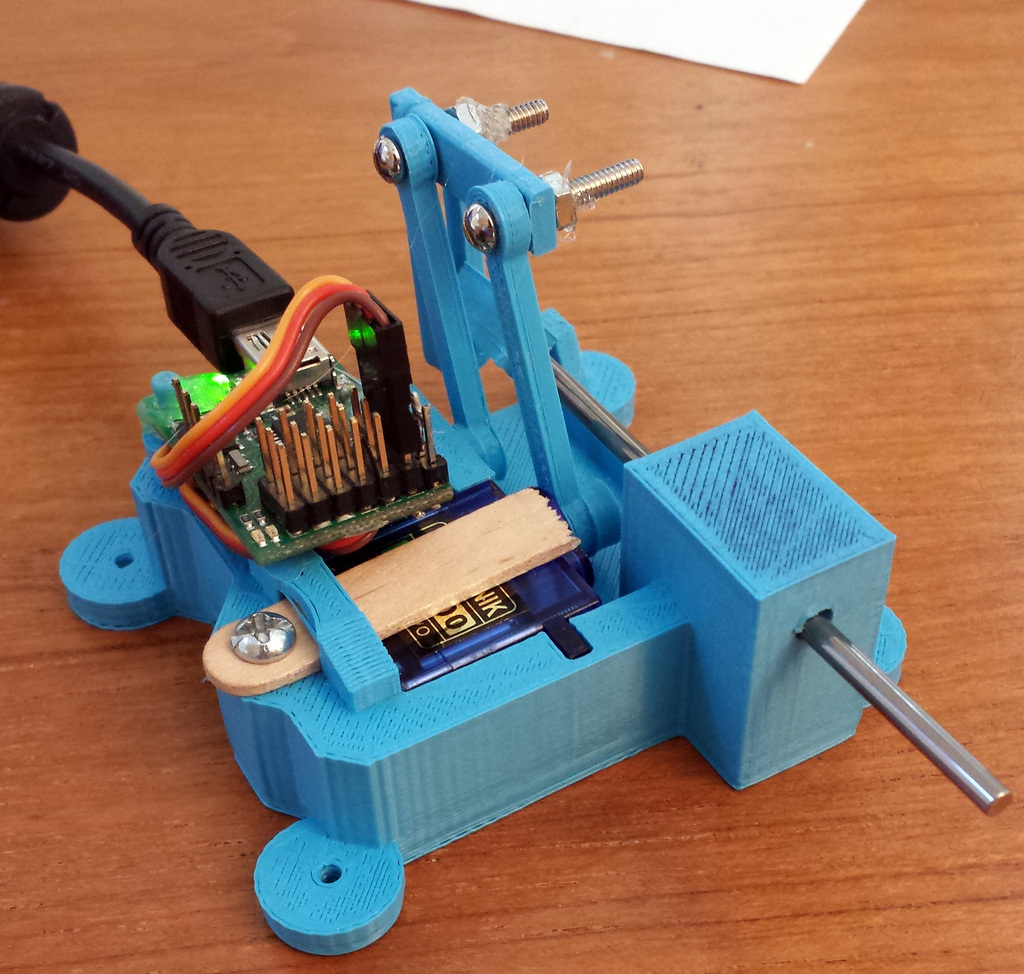
Bottom Views:
Microcontroller: Basic Stamp 2
Programming Language: PBASIC
Controller Board: BotBoard II
Power: Standard Alkaline 9V
Drive Train: 2x continuous-rotation servos
Sensor: Memsic 2125 Dual-axis Accelerometer
Chassis: Recycled CD-ROM
Theory of Operation:
The accelerometer measures the tilt of the birdy perch on the xy-axes, sending the values to the Basic Stamp, which, using a rudimentary proportional algorithm, calculates appropriate servo speeds and rotations.
Bottom Views:
Questions? Enjoy this post? Leave a comment below or send me an email: [email protected]











 RSS Feed
RSS Feed
